Saxony 5 | Smart University Grid



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Wissensströme intelligent vernetzen
Der kooperative, interdisziplinäre Transferverbund Saxony5 widmet sich dem Anspruch, das an Hochschulen generierte Wissen intensiver für die Zusammenarbeit mit Gesellschaft und Wirtschaft zu nutzen sowie für gemeinsame FuE-Projekte in der Innovationsregion Sachsen einzusetzen. Im Verbundforschungsprojekt werden Knowhow und Ressourcen der fünf sächsischen Hochschulen für Angewandte Wissenschaften (kurz:HAW) Dresden, Leipzig, Zwickau, Zittau/Görlitz und Mittweida in einem Smart University Grid gebündelt. Ziel ist es, auf Grundlage einer gemeinsamen Transferstrategie die intelligente Vernetzung von Wissensströmen zu fördern. Als aktiver Partner im Teilvorhaben 5 Additive Fertigung entwickelt FLEX das Smart Manufacturing Lab (kurz: SML). Im Mittelpunkt des experimentellen Werkstattlabors steht ein hochmoderner Industrieroboter. Mit diesem sollen Strategien zur individualisiert-automatisierten Fertigung unter Nutzung additiver Fertigungstechnologien entwickelt werden.
Interdisziplinärer Austausch im Co-Creation Lab und Transferportal
Die Grundlage für die Zusammenarbeit im Verbundprojekt bilden sechs standortübergreifende Transferlabore. Diese sogenannten Co-Creation Labs sind thematisch auf jeweils ein wirtschaftlich oder gesellschaftlich relevantes Thema ausgerichtet. Zusätzlich stellt ein Transferportal das Knowhow und die Expertise der beteiligten Forscher in komprimierter Form dar. Es bietet so Raum für das Finden und Bilden neuer Kontakte und Kooperationen. Die Plattform ist dabei nicht nur für Saxony5-Partner, sondern für alle nutzbar, die an der Umsetzung neuer Ideen mitwirken möchten. Ziel ist es, Interessierten die Möglichkeit zu geben, schneller und direkter potenzielle Projektpartner an den sächsischen HAW zu finden. Damit werden die Voraussetzungen geschaffen, das eigene Kompetenzspektrum zu erweitern und auf diese Weise neue Forschungs- und Entwicklungsprojekte zu initiieren. Als Saxony5-Projektpartner ist auch FLEX als Ideengeber und Entwickler im Portal vertreten.
Additive und subtraktive Fertigung im Makrobereich
Digitale, numerisch gesteuerte Fertigungsverfahren sind in zahlreichen primär industriellen Einsatzfeldern bereits weit verbreitet. Zumeist ist die eingesetzte Robotertechnologie auf die repetitive und präzise Wiederholung von spezifischen Vorgängen ausgelegt.
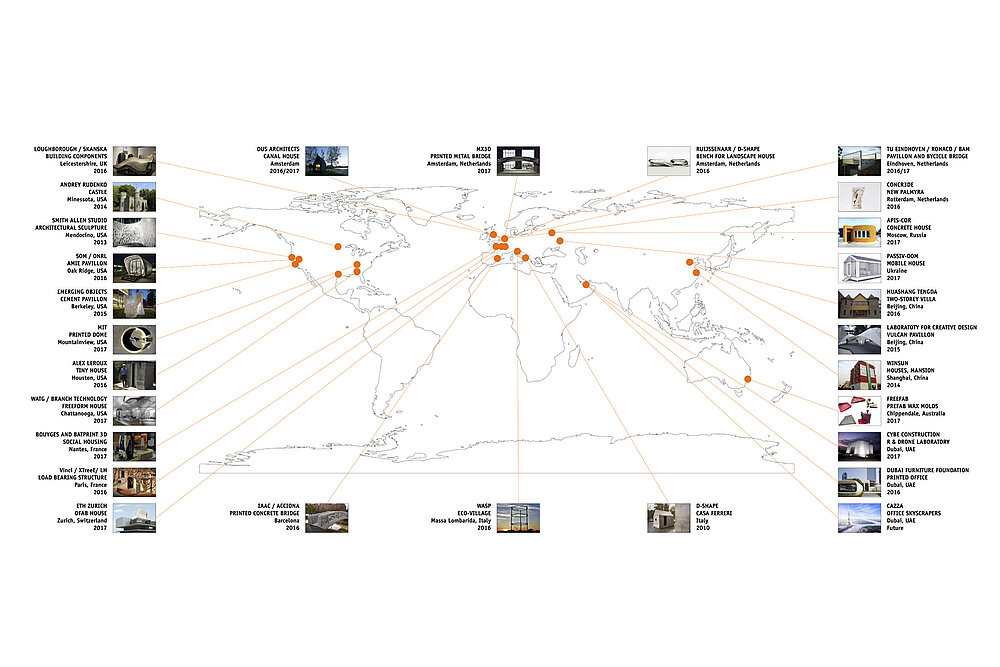
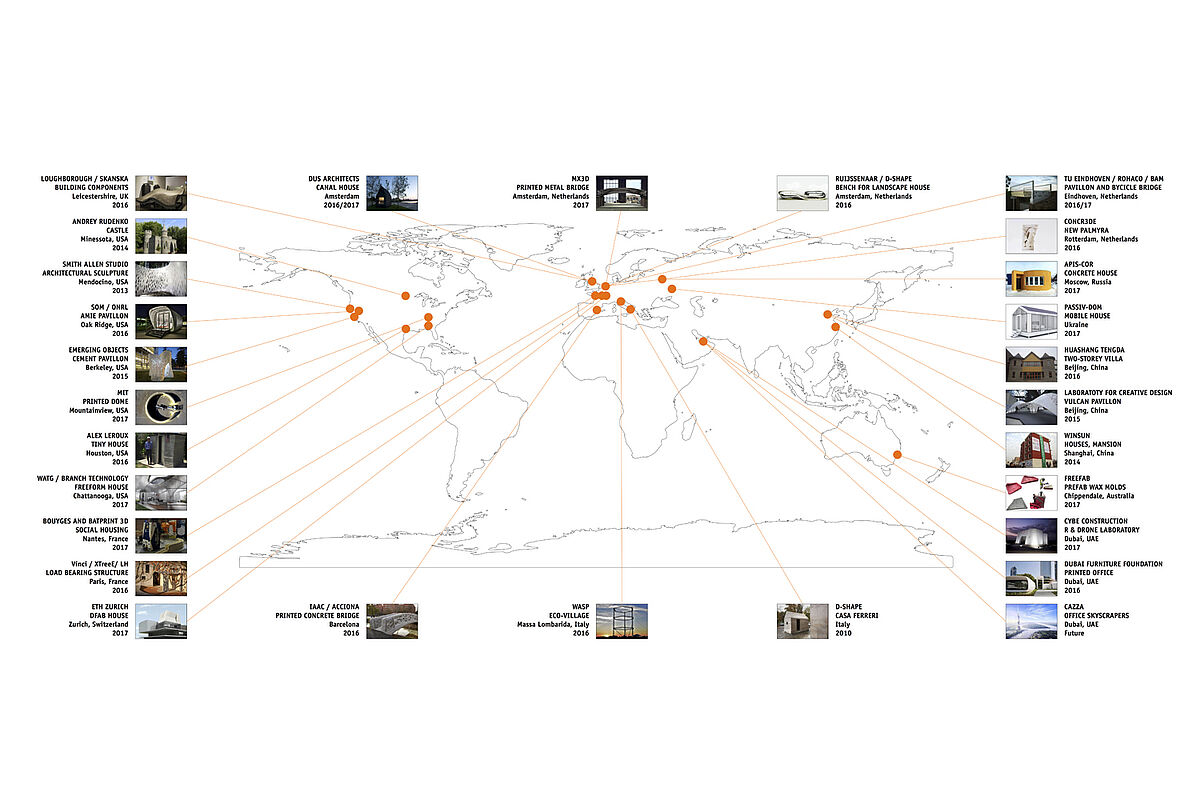
In der Architektur werden robotische Fertigungssysteme bisher kaum genutzt. Diese Situation ist ursächlich darauf zurückzuführen, dass Bauwerke zum einen „individuelle Konstruktionen“ sind, und dass die „Herstellungsstrategien“ zum andern noch immer mehrheitlich auf handwerklich organisierte Prozesse auf der Baustelle ausgerichtet sind. Generalisierend kann festgestellt werden, dass es bisher nur wenige Strategien für großmaßstäbliche Anwendungen automatisierter Fertigungstechnik im Bau gibt. Mit dem Smart Manufacturing Lab am Standort Leipzig sollen die umfassenden Kenntnisse der HAW im Mikro- und Mesobereich der additiven Fertigung um solche im Makrobereich erweitert werden. Das experimentelle Werkstattlabor schafft dafür die „Hardware-seitigen“ Voraussetzungen und ermöglicht die Umsetzung und Unterstützung zahlreicher neuer Ideen und Projekte.
Smart Manufacturing Lab
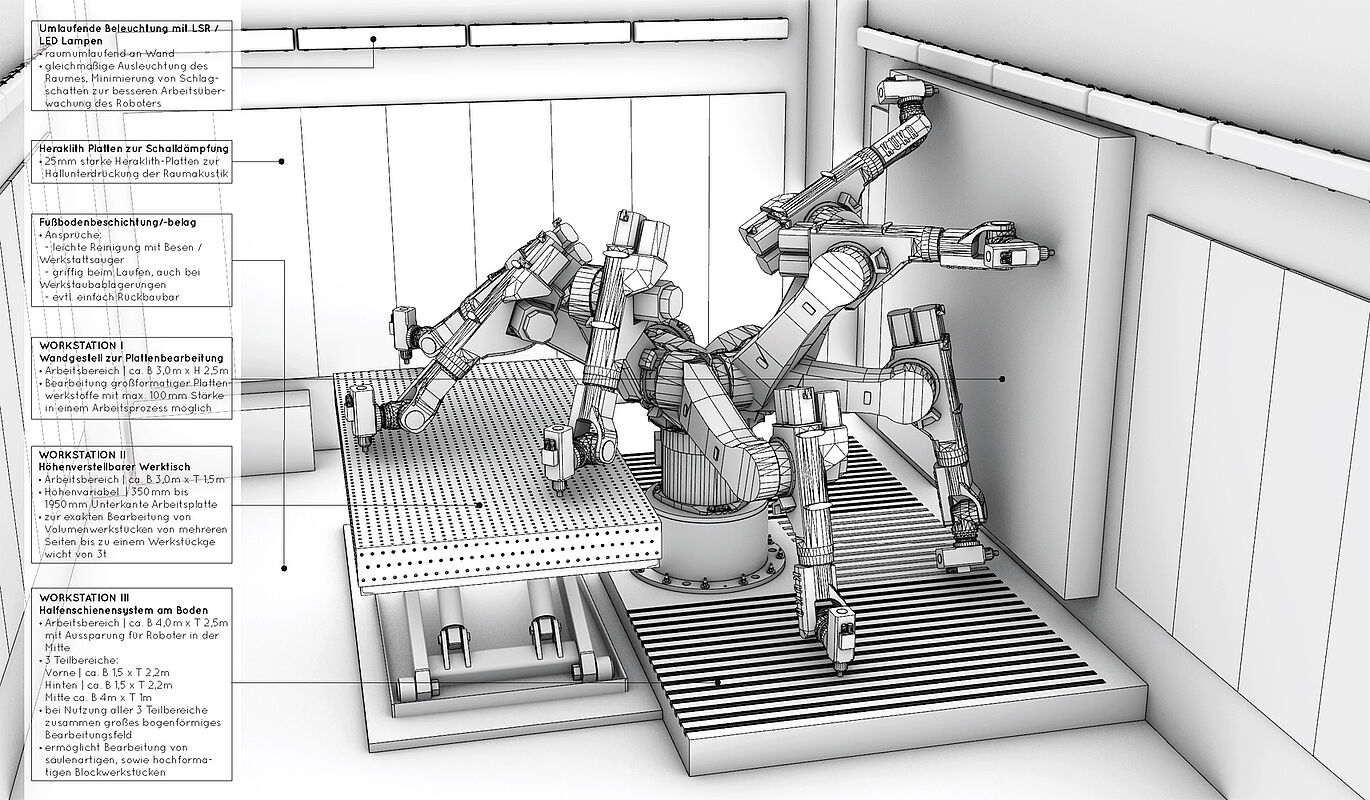
Im TV5 fokussiert das FLEX.team auf die Planung, Entwicklung und Errichtung eines Smart Manufacturing Labs. Dieses Werkstattlabor ermöglicht großmaßstäbliche digitale Fertigungsprozesse. Im auf den AM-Bereich übertragenen Sinne definiert der Arbeitsbereich des Roboters einen Bauraum mit einem Radius von zirka zwei Metern. Je nach eingesetztem Werkzeug können mit Hilfe des Roboters geometrisch komplexe Bauteile aus einer großen Vielfalt an Materialien wie Holz, Kunststoffen, Verbundstoffen aber auch Metallen hergestellt werden. So eignet es sich besonders gut für experimentelle Vorhaben und die Entwicklung von Prototypen.
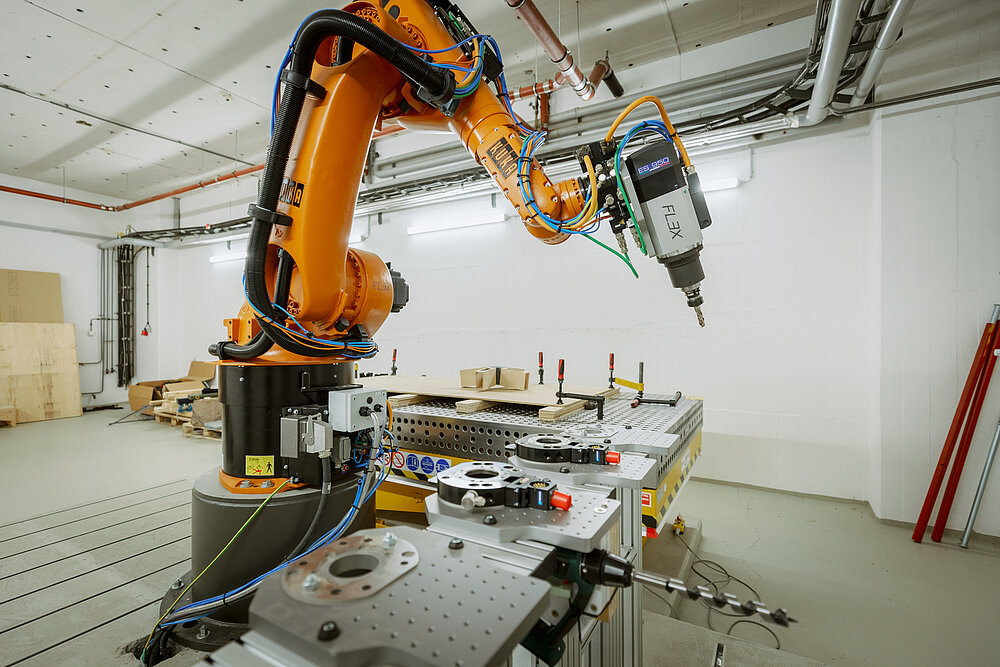
Industrieroboter mit hochmoderner Ausstattung
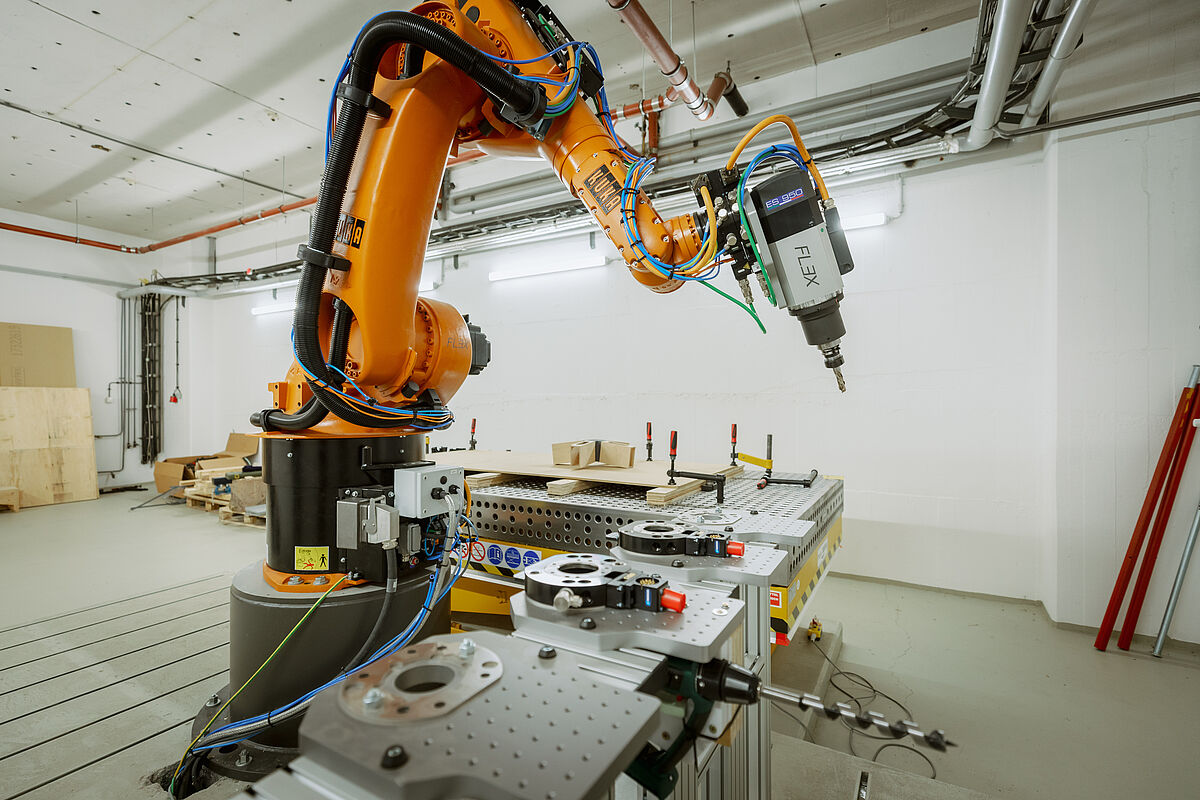
Das Kernstück des SML ist ein sechsachsiger Industrieroboter mittlerer Traglast vom Typ KUKA KR60-HA. Trotz seiner Größe und einem Gewicht von mehr als einer halben Tonne erzielt dieser Bewegungsgeschwindigkeiten von bis zu zwei Metern pro Sekunde im Automatikmodus. Die sechs durch Servomotoren gesteuerten Bewegungsachsen ermöglichen eine Rotation in jede Richtung. Auf diese Weise kann nahezu jede mögliche Position und jeder beliebige Winkel erreicht werden. Die an der Spitze des Roboterarms befindliche Hochgeschwindigkeitsspindel (Typ HSD ES 915A) ermöglicht bei einer Leistung von 3,8 kW im Drehzahlbereich von bis zu 24.000 Umdrehungen pro Minute eine genaue Prozessauslegung in Bezug auf Werkzeug und Werkstück. Auf diese Weise können verschiedene Materialien mit höchster Präzision bearbeitet werden.
Ein vom Robotik-Spezialisten BEC aus Reutlingen speziell für die Anforderungen von FLEX konzipiertes und realisiertes modulares Werkzeugwechselsystem schafft die Voraussetzungen, verschiedene, multifunktionale Endeffektoren automatisiert in das System zu integrieren. Aufgrund der großen Vielfalt kompatibler Werkzeuge wie Fräser, Greifer, Scanner und Sägen, sowie Tools zur additiven Fertigung, können somit komplexe Fertigungs- und Nachbearbeitungsprozesse in Kombination mit additiven und subtraktiven Teilprozessen anwendungsbezogen umgesetzt werden.
Ein hydraulisches Scherenhubsystem mit Systemschweißtisch der Firma Demmeler ermöglicht die Bearbeitung flächiger Bauteile mit einer maximalen Größe von 300 x 150 cm. Die höhenverstellbare, komplett perforierte Werkbank trägt eine Last von bis zu 3 Tonnen. Die Verbindung aus Scherenhubtisch und Werkzeugwechselsystem eröffnet vielfältige Kombinationsmöglichkeiten aus Werkzeugen und Werkstücken und eignet sich so für eine große Bandbreite an Fertigungs- und Bearbeitungsprozessen. Dank ihrer eindeutigen Positionierung im Werkraum können sowohl der Scherenhubtisch als auch das Werkzeugwechselsystem nahtlos in die digitale Steuerung integriert werden.
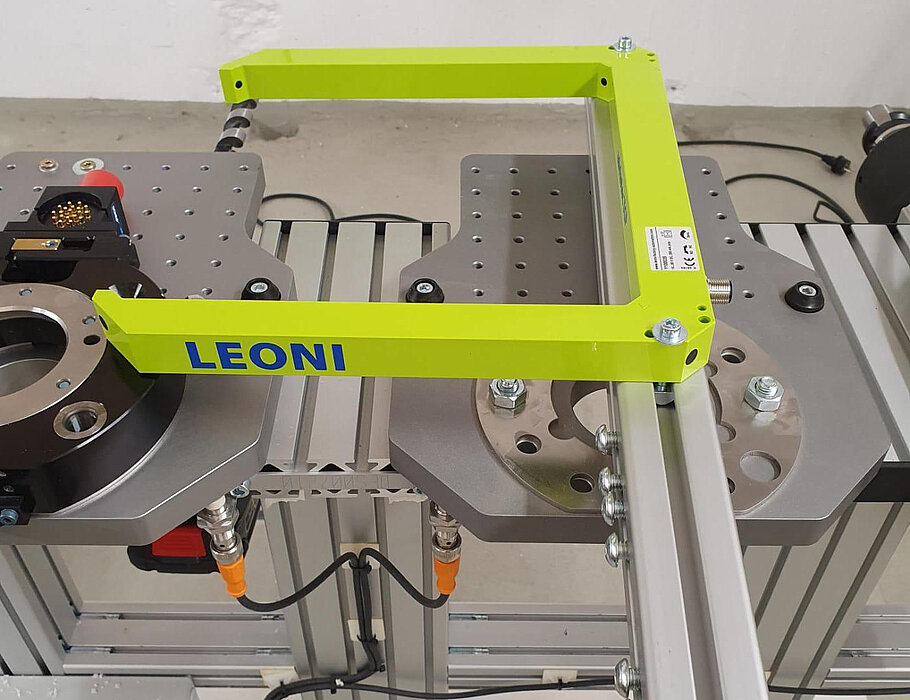
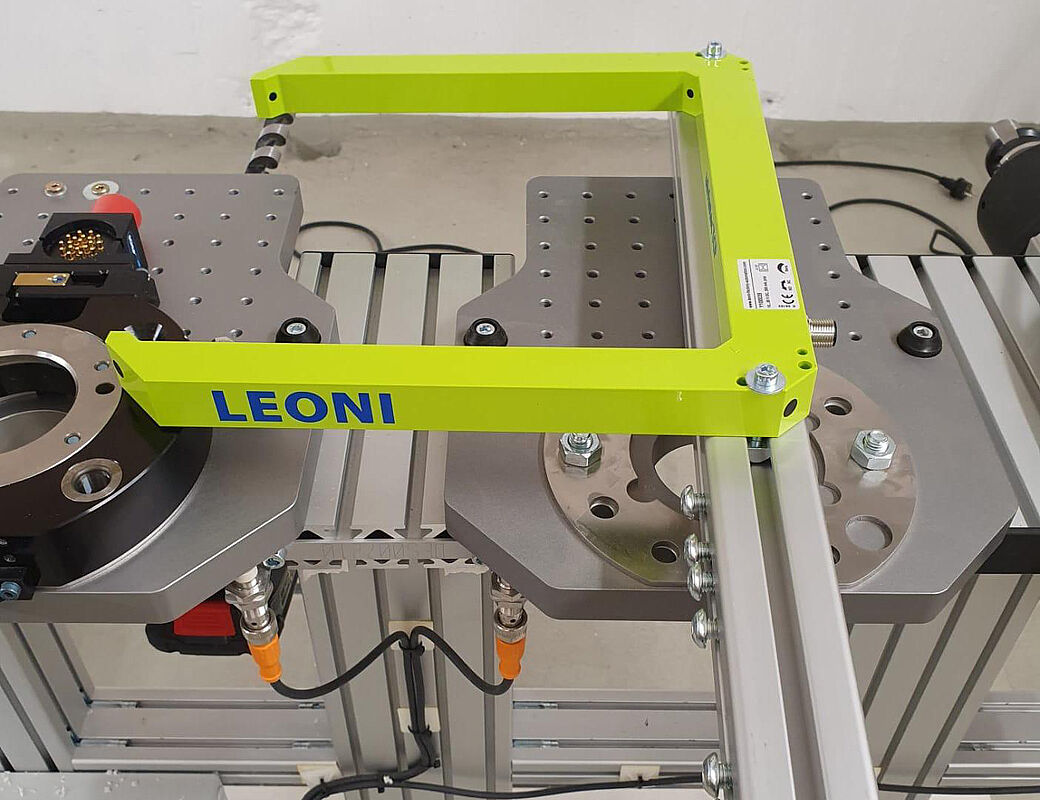
Für die Programmierung der Bewegungspfade und Arbeitspositionen bedarf es einer präzisen messtechnischen Erfassung und Ausrichtung sowohl des Werkstücks als auch des Werkzeugs vor Ort in Relation zum Robotersystem. Dafür steht im SML ein laserbasiertes Einmesssystem (Typ advintec TCP - LEONI) zur Verfügung. Dieses ermöglicht die Berechnung und Kalibrierung von Werkzeugen in sechs Dimensionen. Dafür werden zwei orthogonal ausgerichtete Laser verwendet, durch die der Roboter das Werkzeug mehrmals bewegt. Die dabei entstehenden Messdaten werden rechentechnisch ausgewertet und an die Robotersteuerung übermittelt, woraufhin sie direkt für nachfolgende Bearbeitungsprozesse verwendet werden können. Auf diese Weise werden äußerst präzise Messungen mit geringem Zeitaufwand ermöglicht.
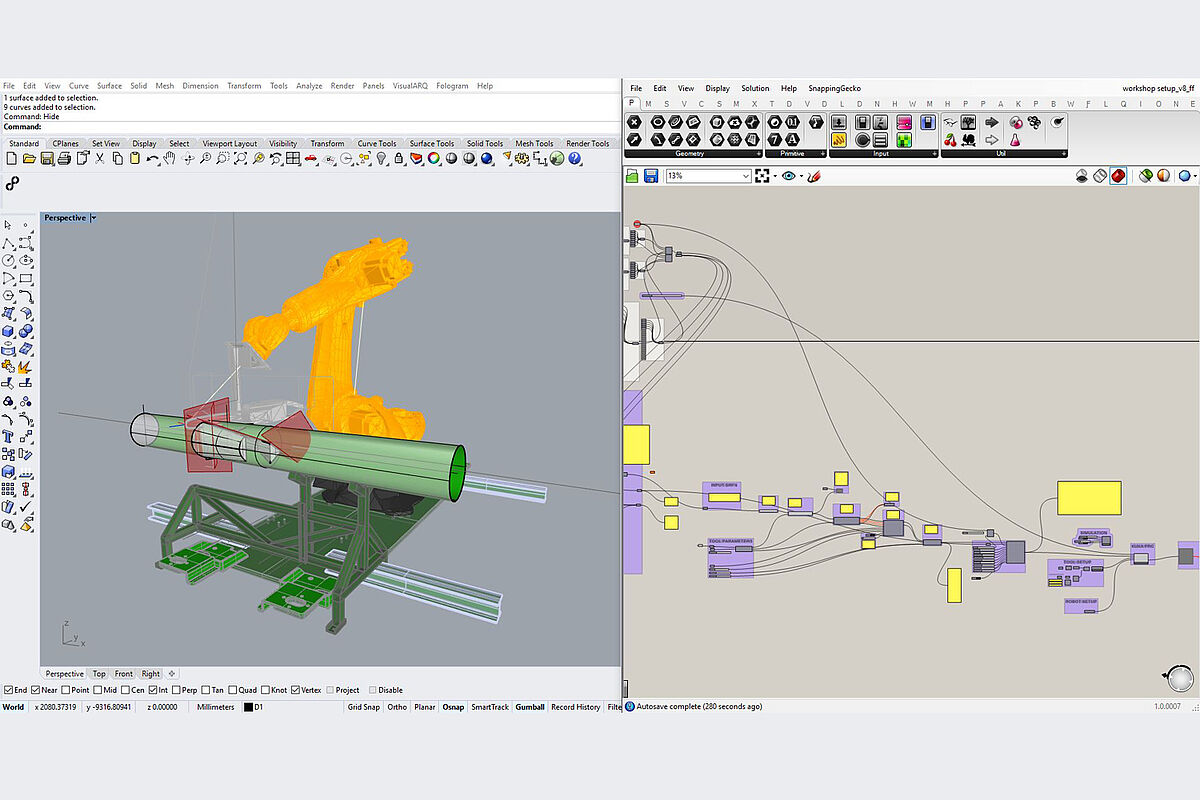
Digitaler Workflow
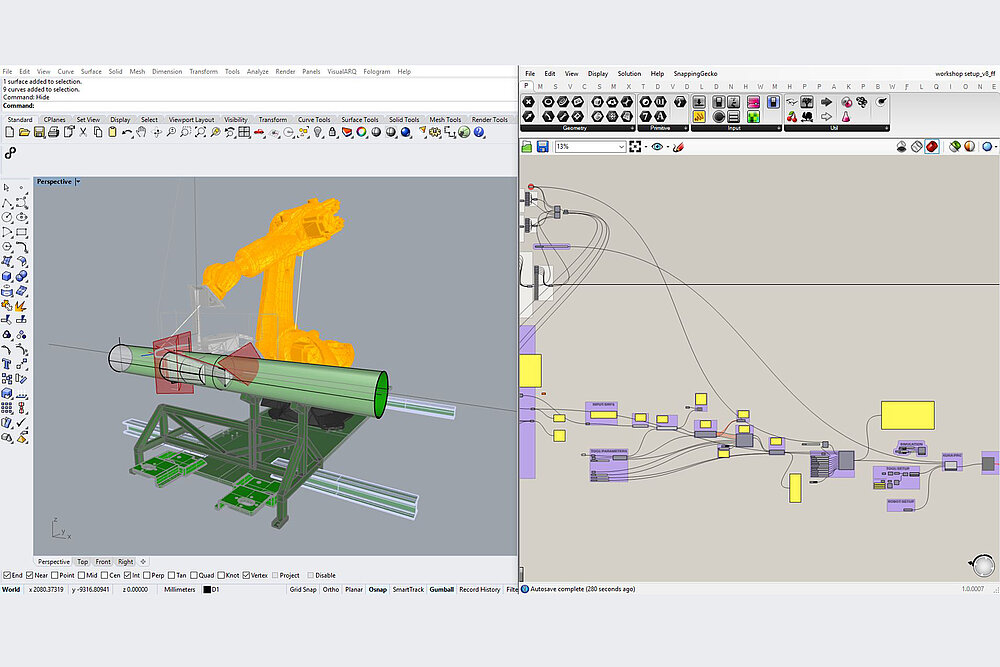
Der Roboterarm ist sowohl manuell mittels Fernbedienung als auch automatisch über ein Kontrollcenter am Computer steuerbar. Der digitale Workflow von FLEX basiert dabei immer auf einem digitalen Abbild der Arbeitsumgebung, welche in einer CAD-Umgebung (bei FLEX: Rhinoceros 3D) beschrieben wird. Dazu werden sowohl Werkstück als auch Werkzeug mit dem laserbasierten Einmesssystem messtechnisch erfasst. Diese Informationen werden im zweiten Schritt in die Modellumgebung implementiert. Auf der Basis der so gesammelten digitalen Daten werden in einer experimentellen CAD-basierten Programmierumgebung (bei FLEX: Grasshopper) unter Berücksichtigung spezifischer Eigenschaften der verwendeten Werkzeuge (z. B. der Drehrichtung der Spindel) sowie der Bewegungsrichtung des Roboterarms Bewegungspfade und Ausrichtungen mittels mathematischer Algorithmen generiert.
Simulationen im 3D-Modell ermöglichen das frühzeitige Erkennen und Beheben von eventuellen Verdrehungen und Kollisionen des Roboters mit dem Werkstück. Dieser initiale Arbeitsschritt ist von signifikanter Bedeutung für alle nachgelagerten Prozesse. Er definiert die Grundlage für den weiteren Verlauf der Fertigung, welche je nach Werkstück, Werkzeug und Art des Fertigungsverfahrens variiert.
Organisatorische Kooperation und fachlicher Austausch
Im Kontext der Konzipierung des SML trat FLEX bereits 2018 dem Wissenschaftsnetzwerk Robots in Architecture bei. In mehreren Workshops und Veranstaltungen konnten Mitarbeiter der Forschungsgruppe viele neue Erkenntnisse gewinnen und ihr Knowhow im Bereich der Roboter und Roboterprogrammierung deutlich erweitern.
Saxony5 2.0
Der Trasferverbund Saxony5 geht in die zweite Förderrunde, um weiterhin den Wissens- und Technologietransfer in Sachsen aktiv zu unterstützen. Für weitere fünf Jahre kann die Vernetzung der fünf sächsischen Hochschulen in einem Smart University Grid gefördert werden.
Ausblick
Im Verbundprojekt Saxony5 steht die Verbesserung der Zusammenarbeit zwischen HAW und regionalen Partnern aus Wirtschaft, Industrie und Gesellschaft an erster Stelle. Das vom FLEX.team im Rahmen des TV5 entwickelte Smart Manufacturing Lab erweitert die Möglichkeiten im Portfolio des Transfer-Netzwerks der sächsischen HAWsignifikant. Das Werkstattlabor ermöglicht prototypische Tests im Kontext großmaßstäblicher, automatisierter Fertigungsprozesse mit variablem Werkzeugeinsatz. Es steht dabei sowohl für Forschungsprojekte mit der Industrie als auch für die Lehre und studentische Projekte zur Verfügung. Damit platziert sich FLEX als innovativer und leistungsstarker Partner mit großer thematischer Offenheit im Kontext zukunftsorientierter Kooperationsprojekte auf digitaler Basis.
Haben die vielseitigen Einsatzmöglichkeiten des Smart Manufacturing Labs Ihr Interesse geweckt? Das FLEX.team freut sich stets über neue Projekt- und Kooperationsideen. Schreiben Sie gern eine E-Mail, wenn Sie Forschungs- und Entwicklungsvorhaben gemeinsam mit FLEX im SML umsetzen möchten.
Keywords: Additive Fertigung, CAD, CAM, digitale Fertigung, Interdisziplinarität, Rapid Prototyping, Robotik, Robots in Architecture, SML, Smart Manufacturing Lab, Transfer, Workshop