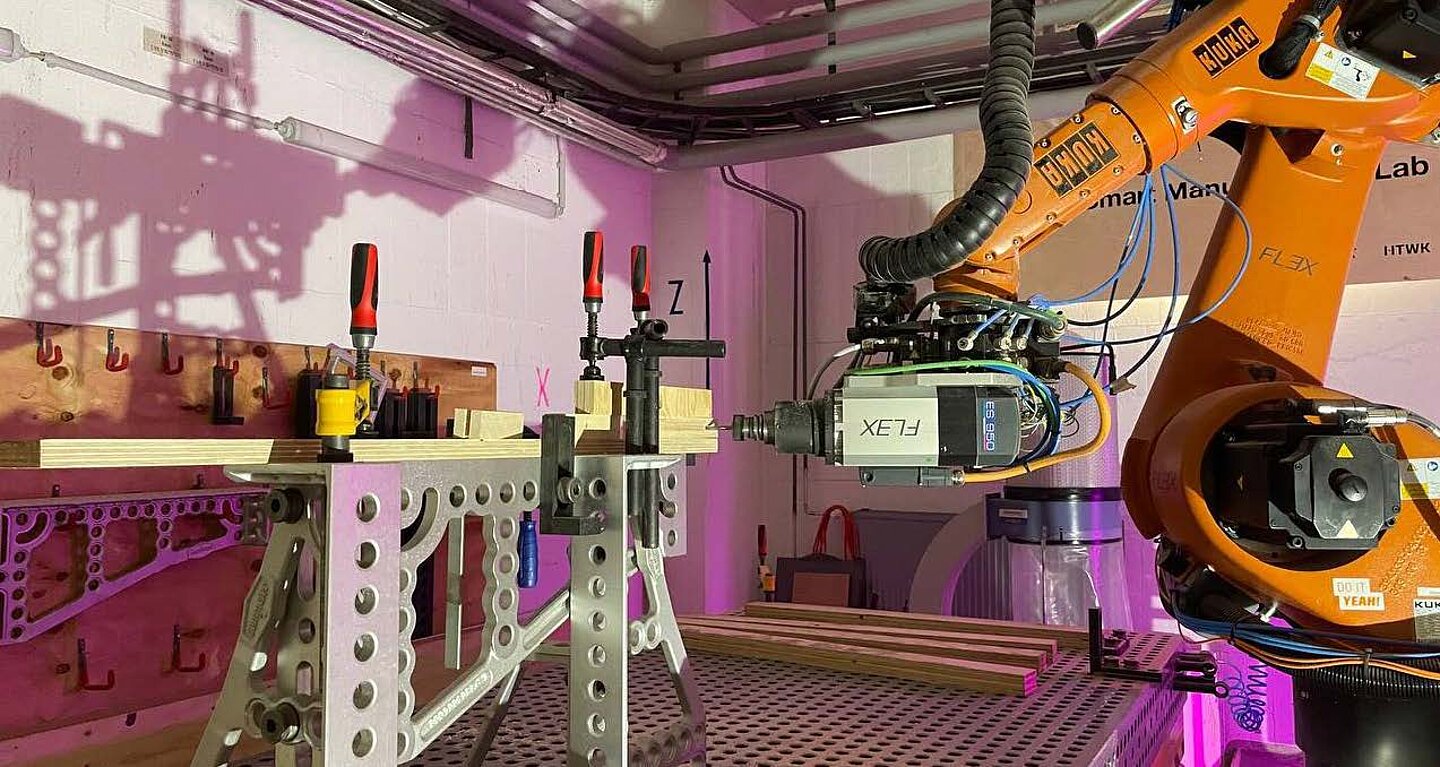
Prototypisches Setup für die robotische Fertigung von zimmermannsmäßigen Verbindungen an stilförmigen Bauteilen; Foto: FLEX@HTWK-Leipzig, Felix Schmidt-Kleespies
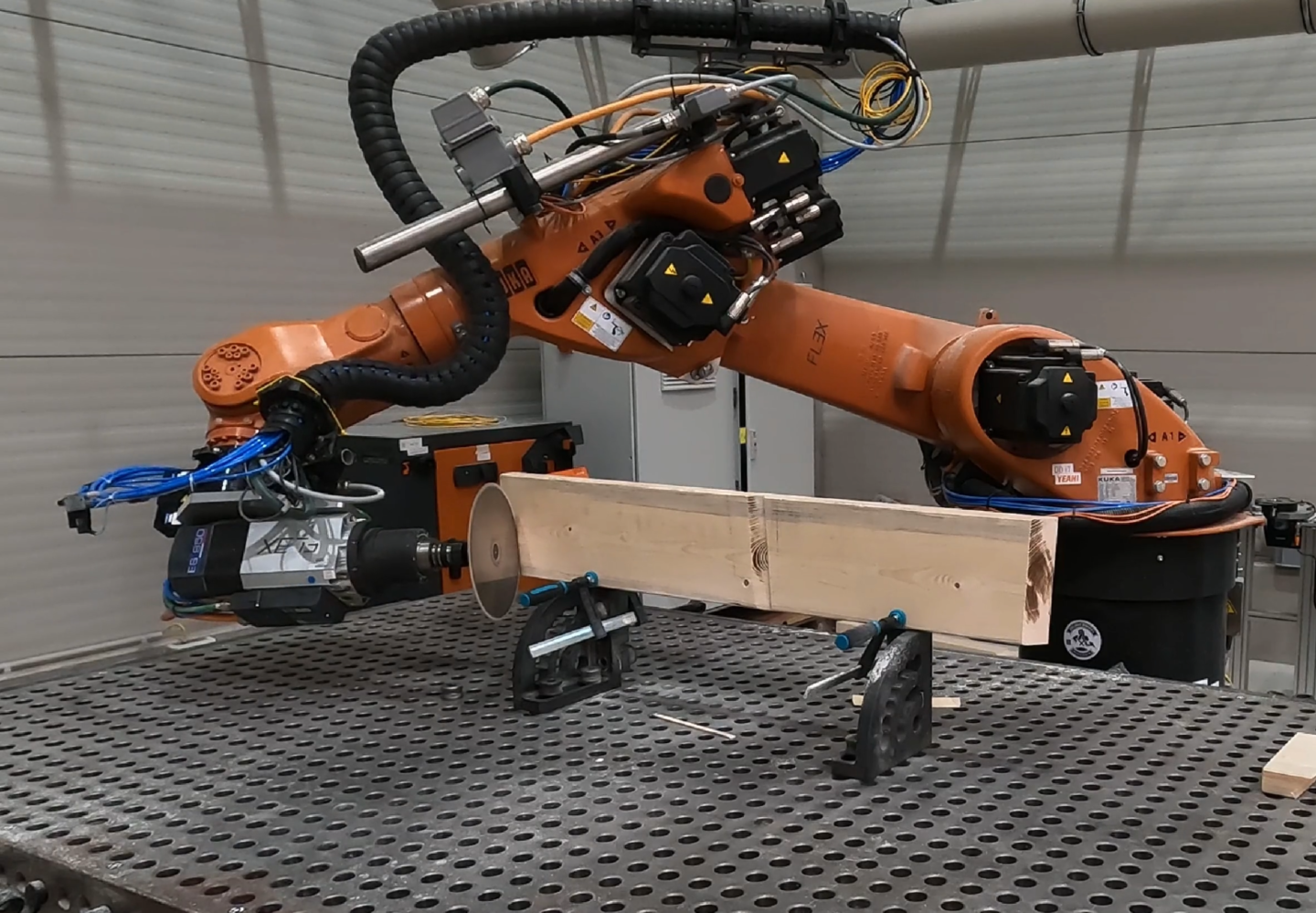
Robotischer Abbund einer Zollinger Lamelle, Foto: FLEX@HTWK-Leipzig
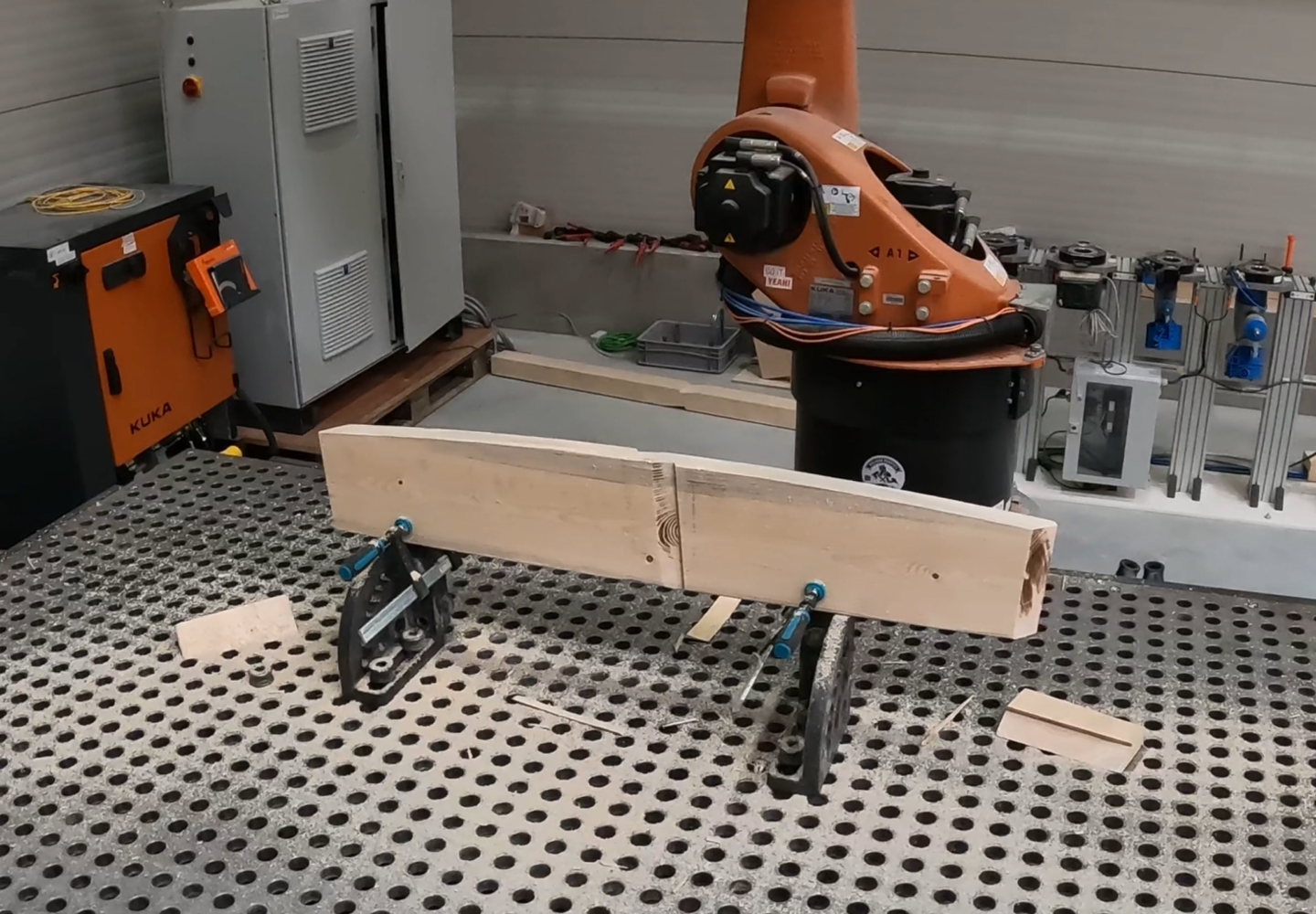
Ergebnis des Fertigungsprozess einer Zollinger Lamelle, Foto: FLEX@HTWK-Leipzig
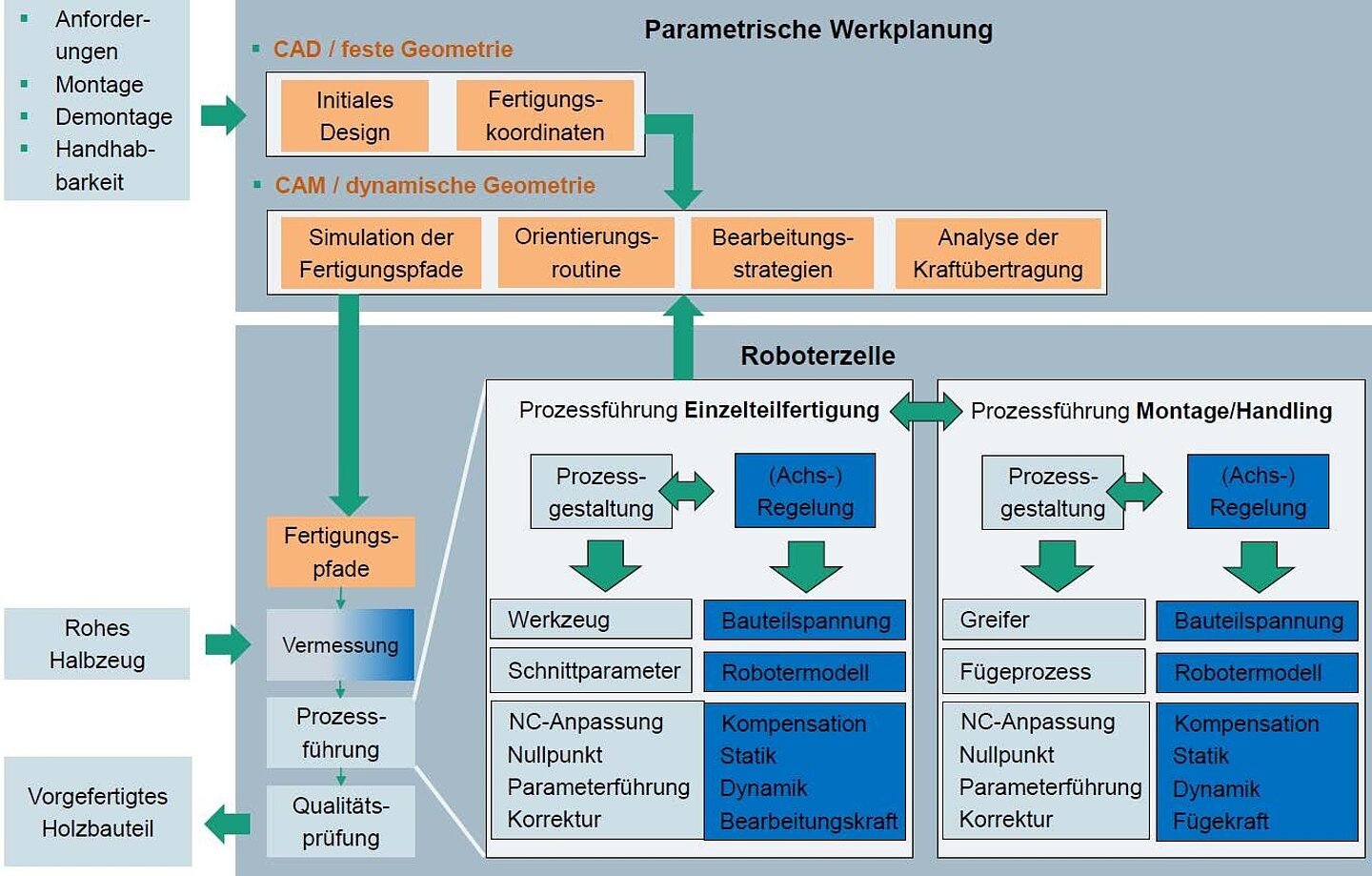
Workflow zur Holzbearbeitung mit einem kleinmaßstäblichen robotischen System, HTWK: orange, TUC: dunkelblau IWU: hellblau; Grafik: Fraunhofer IWU, Jan Berthold
TimberBot
Progression des robotischen Abbunds durch Erhöhung der Positionstreue
Der Einsatz von Industrierobotern im Abbund und in der Vorfertigung des Holzbaus hat sich bisher noch nicht etablieren können. Die Technologie bietet aber im Kontext ihrer vielfältigen Möglichkeiten insbesondere kleinen und mittleren Unternehmen (KMU) des Holzhandwerks spannende anwendungsbezogene und ökonomische Potentiale. Im Vergleich zu großen Abbundanlagen sind sie platzsparender, preiswerter, flexibler und vielseitiger.
Das Forschungsprojekt „TimberBot“ zielt darauf ab, die Grundlagen für einen generativen robotischen Workflow sowie eine umfassende Bauteilüberwachung zu entwickeln, um einen automatisierten Holzabbund auf der Basis serieller Industrie-Robotik zu ermöglichen. Die Kooperationspartner des Verbundforschungsprojekts sind die HTWK Leipzig, die TU Chemnitz sowie das ebenfalls in Chemnitz ansässige Fraunhofer Institut für Werkzeugmaschinen und Umformtechnik (IWU).
Im Fokus des Projekts stehen die Erhöhung der Präzision robotischer Systeme sowie die Sicherstellung der notwendigen Positionstreue der Werkzeuge mit Hilfe paralleler Simulations- und Kompensationsansätze. Die zu entwickelnde Prozesse sollen geometrisch hochflexible und zugleich wirtschaftliche Fertigungsabläufe ermöglichen. Das Projekt ist inhaltlich und organisatorisch in drei Teilprojekte gegliedert:
- HTWK Leipzig (FLEX): Erarbeitung anforderungsgerechter Orientierungsroutinen und Bearbeitungsstrategien für den robotischen Abbund
- TU Chemnitz (Professur Produktionssysteme und -prozesse): Antriebsbasierte Fehlerkompensationen zur Befähigung robotischer Systeme für die Vorfertigung im Holzelementebau
- Fraunhofer IWU: Entwicklung von Prozessüberwachung und -führungsstrategien zur Validierung eines Workflows für die anforderungsgerechte, digitalbasierte Vorfertigung von Holz-Halbzeugen und -komponenten im Holzelementebau mit robotischen Systemen
Das Projekt begünstigt die Herstellung formschlüssiger, metall- und leimfreier Verbindungen. Dadurch wird die Wiederverwendung bestehender Holzbauteile gefördert und die Menge des im Fertigungsprozess anfallenden Abfallmaterials deutlich reduziert. Gleichzeitig unterstützt diese Art der Konstruktion die Möglichkeit einer späteren Kaskadennutzung und erhöht die Recyclingfähigkeit. Das Projekt adressiert somit Ziele, die auch in der Holzbau-Initiative der Bundesregierung verankert sind.
Der geringere Flächenbedarf sowie die reduzierte Logistik des On-site-Fertigungsprozesses mit Industrierobotern entsprechen außerdem einer effizienten, klima- und umweltschonenden Ressourcennutzung. Sie fokussieren somit auf ein im Förderprogramm „Nachhaltige Erneuerbare Ressourcen“ des Bundesministeriums für Landwirtschaft, Ernährung und Heimat (BMELH) verankertes politisches Ziel. Dazu zählt auch die Stärkung der Wettbewerbsfähigkeit der heimischen Wirtschaft durch neue und/oder verbesserte Technologien, Prozesse und Produkte. Dieses „Bauen auf Zukunftsfähigkeit“ spiegelt sich in der Integration robotischer Systeme in die bestehenden Fertigungsprozesse kleiner und mittlerer Unternehmen der holzverarbeitenden Industrie wider.
Keywords: Robotik, Bauwesen, Automation, Digitalisierung, Holz-Holz-Verbindungen
Fakten
Projektleitung
• Prof. Dr.-Ing. Alexander Stahr
Projektmanagement
• Arne Tischer, B.Eng.
Bearbeitung
• Arne Tischer, B.Eng.
Kooperationspartner
• PSP / Technische Universität Chemnitz
• Fraunhofer-Institut für Werkzeugmaschinen und Umformtechnik (IWU)
Unterstützende Unternehmen
• AKE Systemtechnik GmbH
• BENNERT GmbH
• HBS Berga GmbH & Co. KG
• IMHOLZ GmbH | Die Behrens Gruppe
• LEIDORF Gruppe
• Leitz GmbH & Co. KG
• METSÄWOOD Deutschland GmbH
• SCHILCHER Trading & Engineering GmbH | X-Fix Holz-Holz Verbindungssysteme
• Mafell AG
Fördermittelgeber
Bundesministerium für Ernährung, Landwirtschaft und Heimat
Projektträger
Fachagentur für Nachwachsende Rohstoffe e. V. (FNR)
Projektlaufzeit
10|2025 - 03|2027
Förderkennzeichen
2224HV039A
Fördersumme
194.012,52 EUR