PineWall









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Die Entwicklung eines innovativen Holzkonstruktionskonzepts
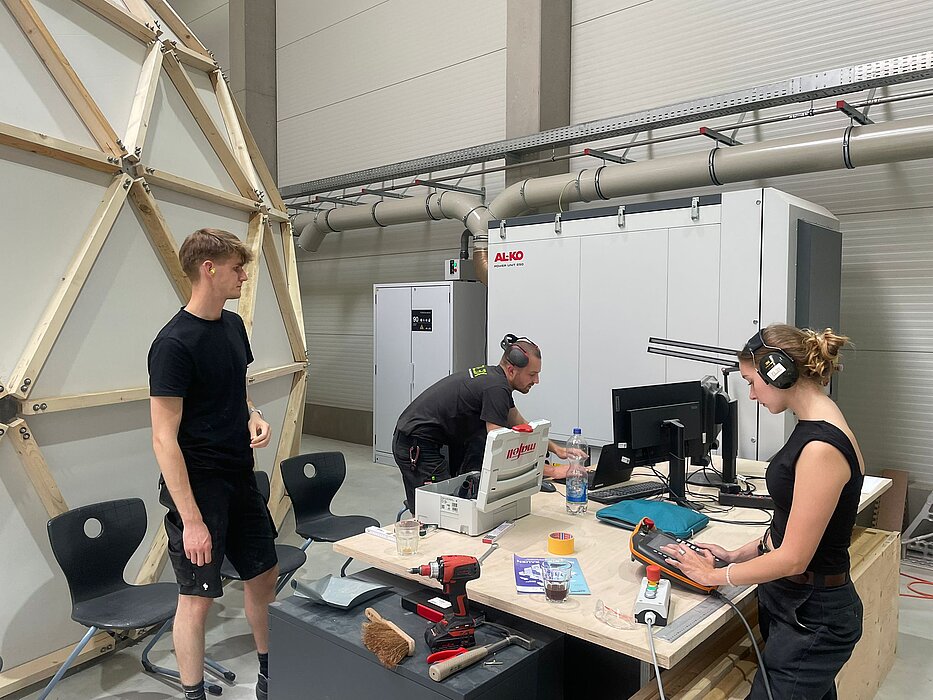
Das Projekt war Teil eines Wahlpflichtmoduls im Masterstudiengang Architektur. Ziel war es, anhand einer Monomaterialkonstruktion aus Holz die gesamte Prozesskette der robotischen Fertigung praktisch zu erproben. Die Studierenden entwickelten eigenständig ein innovatives Konstruktionskonzept, bereiteten es digital auf und setzten es mit modernen Maschinen um – darunter ein Industrieroboter (KUKA KR60), eine 3-Achs-CNC-Fräse sowie die Software Rhinoceros 3D und Grasshopper.
Während einer fünftägigen Summer School im HolzBauForschungsZentrum der HTWK Leipzig begleiteten die Dozierenden den Prozess von der ersten Idee bis zur Fertigung. Zu Beginn entstanden Pappmodelle zur Untersuchung komplexer Geometrien und als gemeinsamer Einstieg ins Thema. Anschließend arbeiteten drei Gruppen parallel an Unterkonstruktion, Grobbearbeitung mit der mobilen CNC-Fräse Goliath und präziser Endbearbeitung mit dem KUKA-Roboter. Bereits am zweiten Tag liefen erste Fräsvorgänge, ergänzt durch einen Fachvortrag zur seriellen Fertigung.
Im weiteren Verlauf optimierten die Teams Werkzeuge, Parameter und Abläufe. Die Goliath-Gruppe steigerte die Bearbeitungsgeschwindigkeit, die KUKA-Gruppe löste technische Probleme und fertigte die erste präzisionsgefräste Pyramide. Parallel entstanden alternative Fügungslösungen mit dem metallfreien LIGNOLOC-System. Durch Aufgabenaufteilung in Untergruppen zum Beispiel für Nesting, Labeling und Nachbearbeitung, konnten Datenaufbereitung und Feinarbeiten effizient parallelisiert werden. Trotz technischer Herausforderungen durch Hitze und Staub entstanden bis zum vierten Tag 18 Bauteile.
Am Abschlusstag stand die maximale Auslastung der Fertigung im Fokus. Nach weiteren Optimierungen wurden 38 Bauteile produziert und zu sieben Pyramiden sowie mehreren Wandsegmenten montiert. In der Abschlusspräsentation dokumentierten die Studierenden den gesamten Prozess. Die Summer School zeigte eindrucksvoll, wie sich eine geometrische Idee über analoge Modellarbeit, digitale Planung und robotische Fertigung in eine reale Kleinarchitektur überführen lässt.