Analyse der Absolutgenauigkeit eines Industrieroboters im Kontext der Genauigkeitsanforderungen des modernen Holzbaus

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
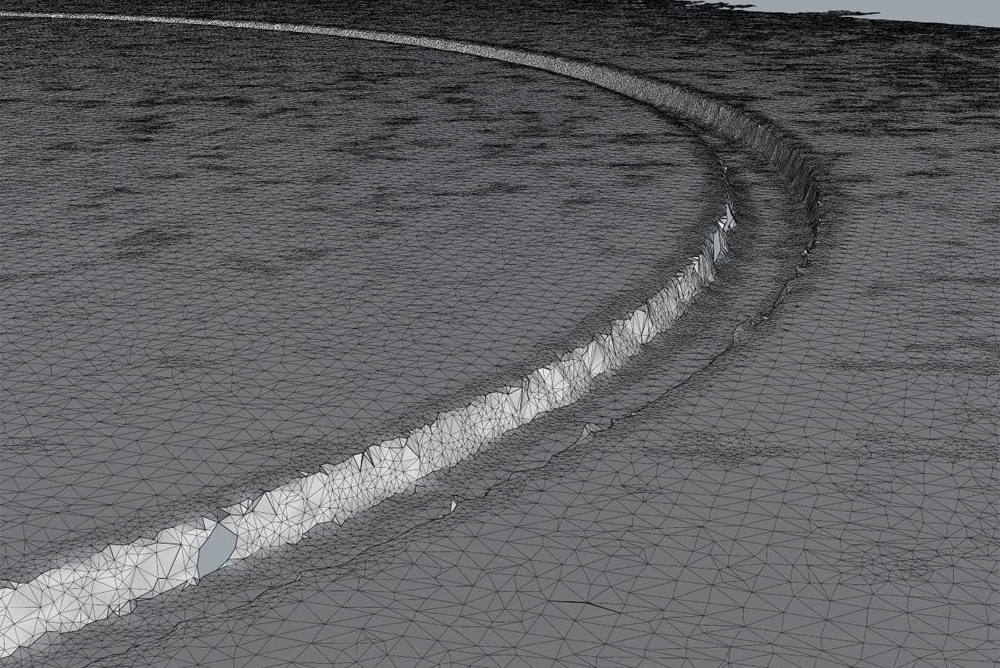
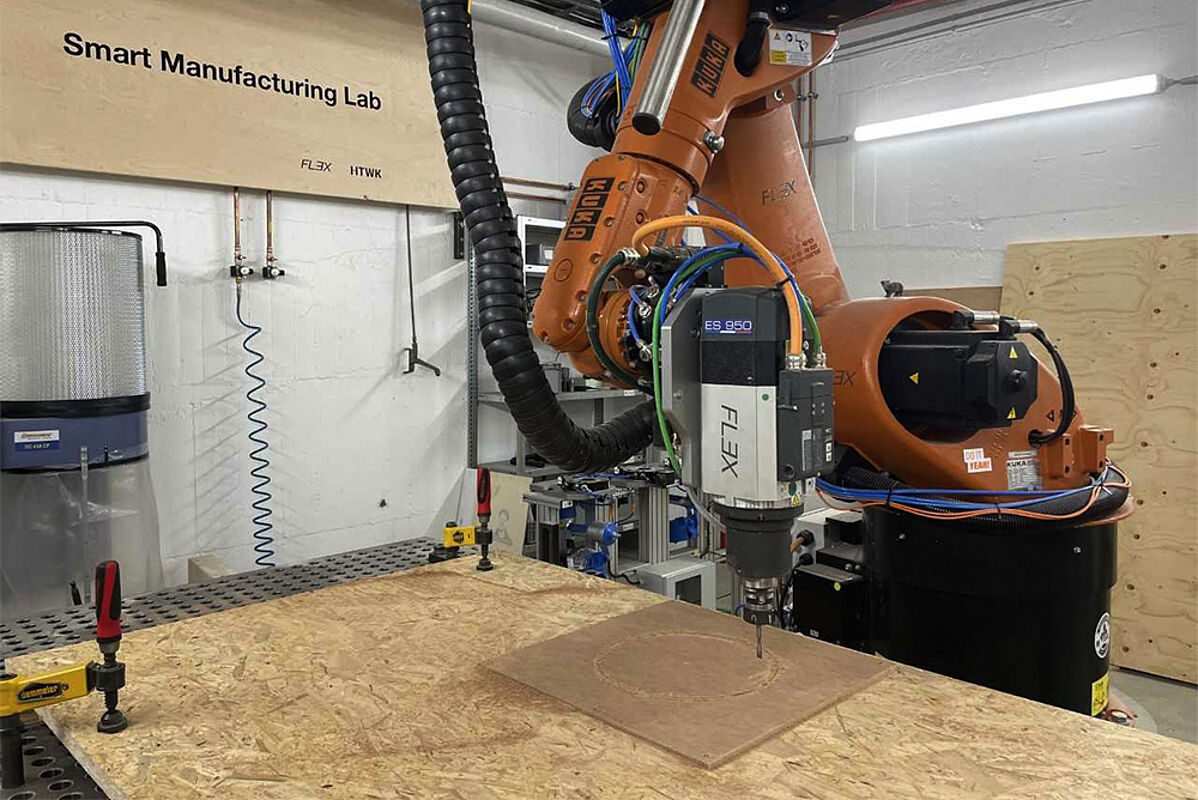
Bei der Nutzung von Industrierobotern im computergesteuerten Abbund für den Holzbau tritt häufig das Problem der unzureichenden Genauigkeit auf, die erforderlich ist, um den Anforderungen des modernen Holzbaus gerecht zu werden. Insbesondere bei der Fertigung von Verbindungen können Probleme mit der Passgenauigkeit aufkommen, die die Qualität und Funktionalität der Bauteile beeinträchtigen.
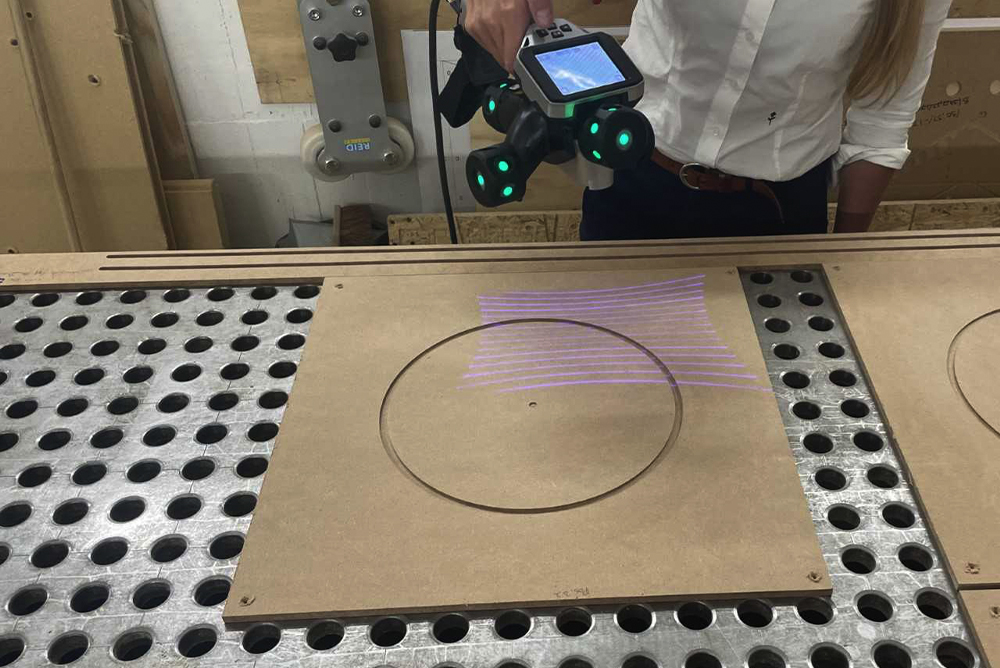
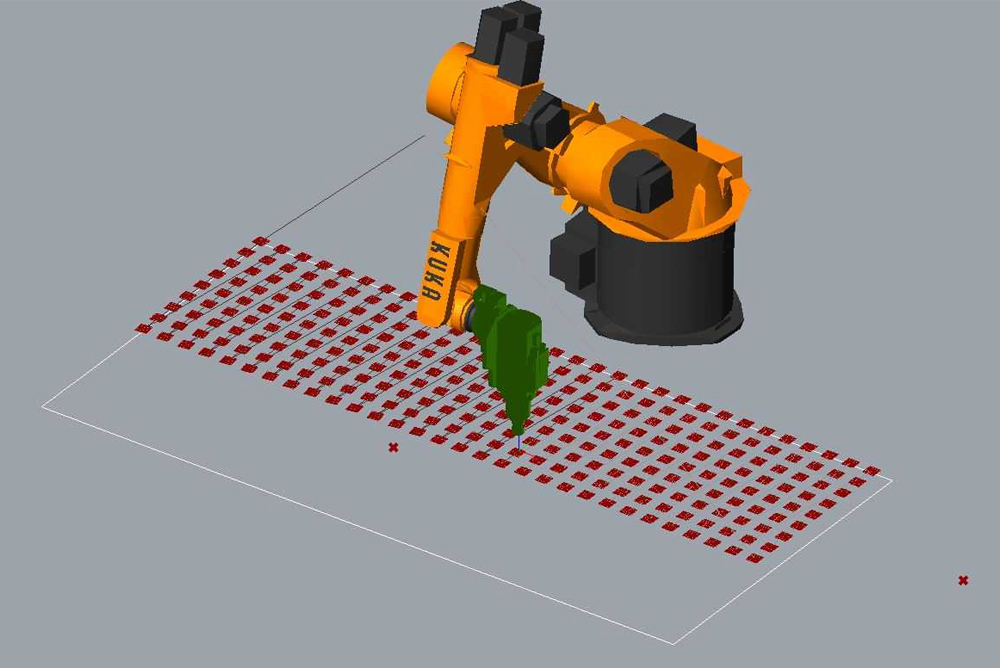
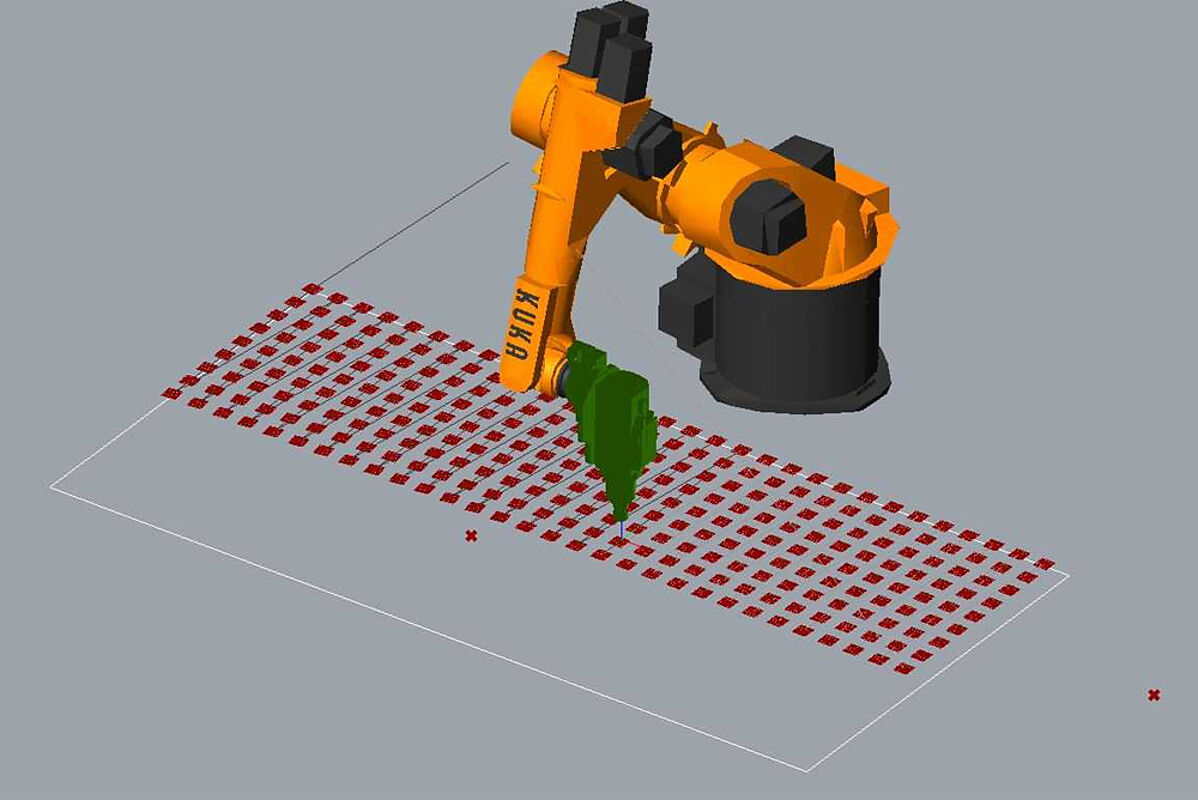
In einem experimentellen Ansatz wurde die Präzision eines marktüblichen Industrieroboters untersucht. Dabei wurde die Leistungsfähigkeit des Roboters hinsichtlich seiner Genauigkeit gemessen und die Ergebnisse mit den definierten Anforderungen verglichen. Ziel war es, die Eignung des Roboters für den Einsatz im Holzbau zu bewerten und Empfehlungen für notwendige Optimierungen abzuleiten.
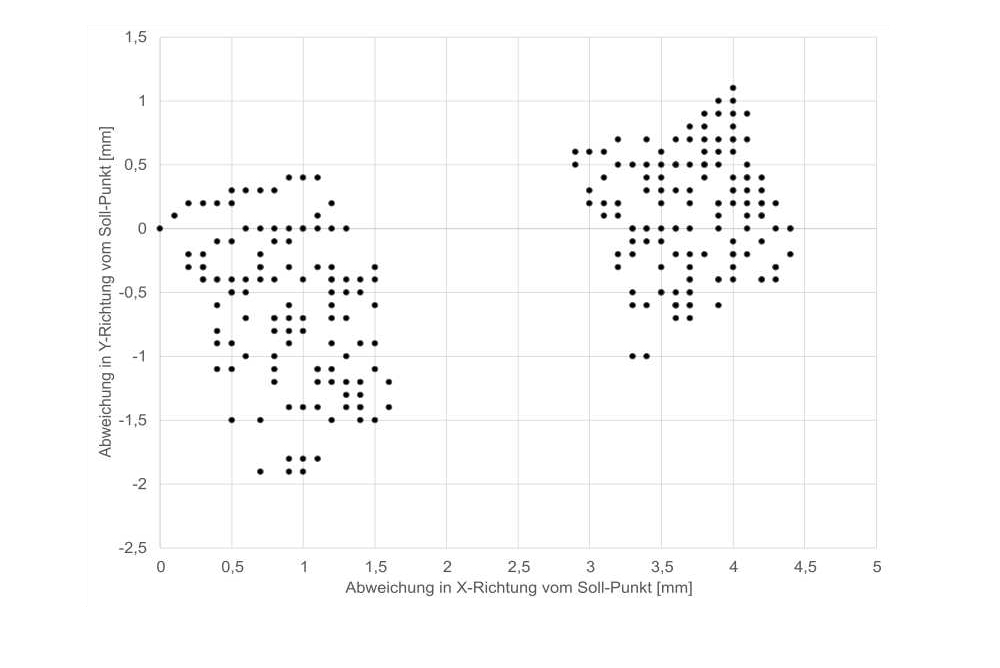
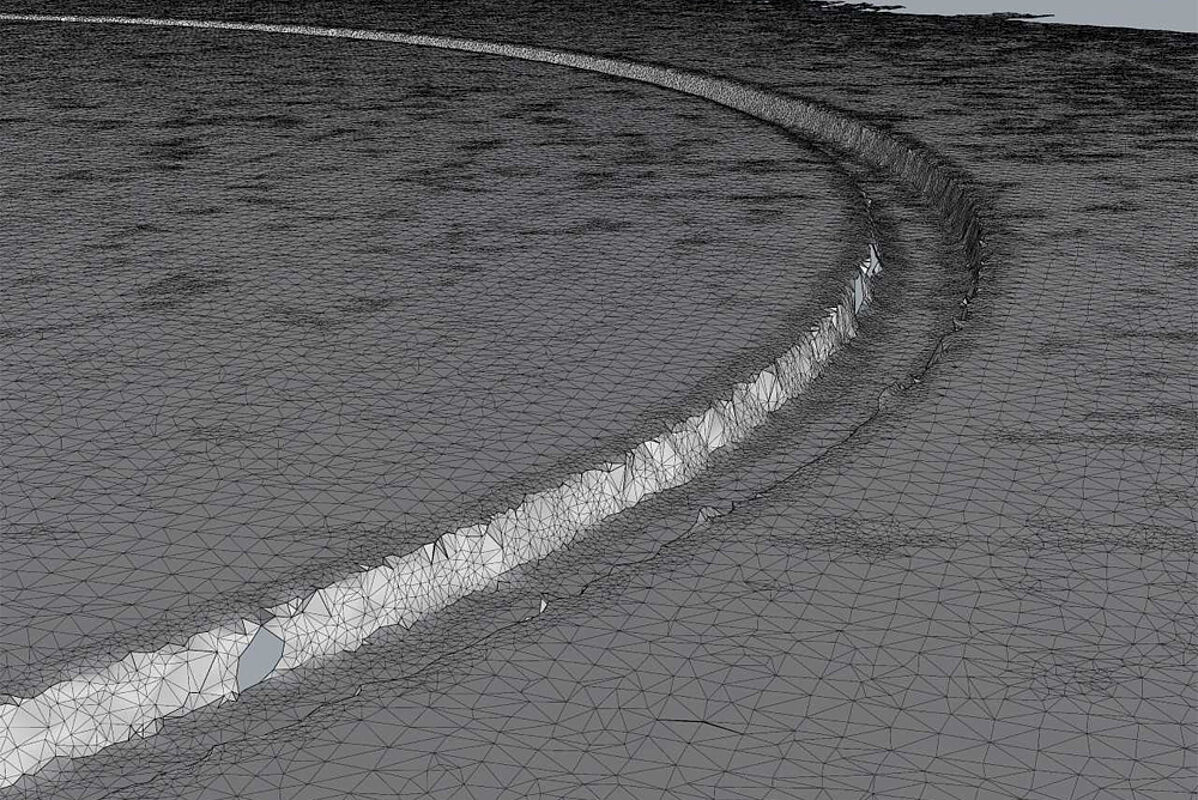
Die Auswertung der Experimente zeigte, dass Industrieroboter unter bestimmten Bedingungen die Genauigkeitsanforderungen im Abbund erfüllen können, insbesondere bei räumlich begrenzten Bearbeitungsbereichen. Allerdings traten bei großflächigen Bearbeitungen über den gesamten Arbeitsraum sowie nach Umorientierungen des Werkzeugs signifikante Abweichungen auf. Um die Präzision zu steigern, werden Kalibrierungsmaßnahmen und angepasste Bearbeitungsstrategien als notwendig erkannt.
Henri von Mulert
Keywords: Digital Architectural Manufacturing, Industrieroboter, Holzbau